19. gadsimta beigās, kad sāka lietot velosipēdus, tiem bija jāsaņem vadītāja apliecība. Tika izveidota cienījama komiteja, kas mācīja braukšanas teoriju un praksi, kā arī izsniedza numura zīmes. Nevienam nebija atļauts nodot transportlīdzekli. Piesardzības iemesls tika skaidrots ar paaugstinātu risku, vadot divriteņu transportlīdzekli. Parasts cilvēks nesaprot, kāpēc velosipēds kustības laikā neapgāžas. Pārsteidzoši, ka pat fiziķi, kas pēta riteņu sistēmu darbību, nevar viennozīmīgi atbildēt uz šo vienkāršo jautājumu.
Teorētiskā analīze un fizikas eksperimenti ir pierādījuši, ka žiroskopiskais impulss un pozitīvs dakšas gājiens nav pietiekami, lai nodrošinātu velosipēda stabilitāti. Papildus kontrolētai stūrēšanai ir arī automātiskā stūrēšana. Turklāt slodzes sadalījumam ir būtiska nozīme līdzsvara uzturēšanā. Kā redzams, velosipēdam ir diezgan ilgs mūžs, tāpēc joprojām tiek atklātas un pilnveidotas jaunas īpašības.
Kāpēc velosipēds braucot neapgāžas
Lai izskaidrotu, cik viegls ir uzdevums, bieži tiek izmantota metafora: “tas ir tikpat elementāri kā braukt ar velosipēdu”. Patiesībā ir jānovērš transporta līdzekļu krišana. Sākumā tika uzskatīts, ka velosipēds brauc uz braucēja rēķina. Cilvēks sajūt konstrukcijas slīpumu, nedaudz pagriež stūri kritiena virzienā un izlīdzina braukšanu. Taču, braucot lielā ātrumā, velosipēds iegūst stabilitāti un nenokrīt pat tad, kad stūre ir atlaista. Vēlāk tika izvirzītas hipotēzes par priekšējā riteņa žiroskopisko darbību un stūrēšanu. Taču izrādījās, ka nevadāmi velosipēdi un robotizēti velosipēdisti arī nekrīt.
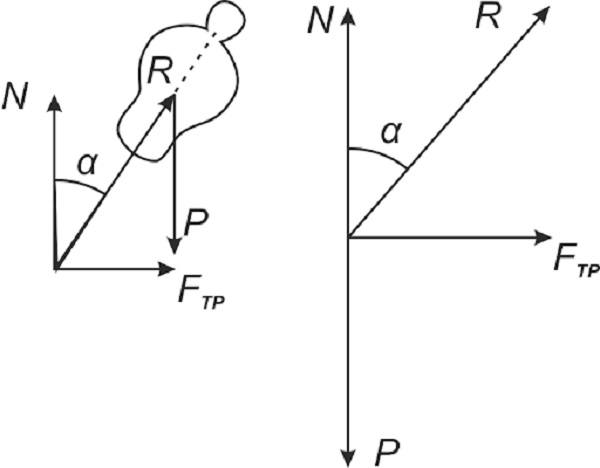
Galvenais jautājums par stabilitātes cēloni ir šāds: kas izraisa atbilstošu attiecību starp slīpumu un pagriezienu? Pastāv vispārpieņemts uzskats, ka efekts rodas rotācijas (žiroskopiskā) griezes momenta un pozitīvas dakšas darbības rezultātā. Priekšējā riteņa stabilizējošā darbība un centrbēdzes spēks, ko izraisa kustības novirze no taisnas sliedes, ir nepieciešamie faktori, lai nodrošinātu velosipēda līdzsvaru.
No fiziskā viedokļa
Zinātnieki ir atklājuši modeli, kas nodrošina divriteņu automobiļu stabilitāti. Priekšējā dakša ieņem centrālo vietu. Šis risinājums ietver stūres ass slīpumu attiecībā pret zemi. Krustpunkts atrodas pirms velosipēda riteņa saskares līnijas ar ceļu. Ja rumbas leņķis novirzās no iestatītās vērtības, tiek radīts reakcijas spēks, kas atgriež transportieri atpakaļ pozīcijā. Šādi velosipēds pats palīdz saglabāt līdzsvaru.
Lai veiktu pagriezienu, braucējam jāmaina smaguma centrs. Piemēram, ja velosipēds ir pagriezts pa labi, priekšējā ass arī ir pagriezta pa labi, un ritenis, kas griežas pulksteņrādītāja kustības virzienā (skatoties no apakšas), daļēji nodod reaktīvo griezes momentu stūres iekārtai. Centrbēdzes spēkam ir tendence pagriezt stūres ratu pa labi. Lai veiktu pagriezienu, velosipēdists noliecas pa kreisi, novirzot velosipēdu un riteņus pa labi.
Otrais faktors, ko izmanto transportlīdzekļa stabilitātei, ir ātruma pieaugums, palēninot ātrumu un stūrējot. Stabilizācijas darbība atgriež riteņus pareizā pozīcijā un neļauj velosipēdam apgāzties. Pieredzējis riteņbraucējs ar rokām, kas piestiprinātas pie stiprinājuma punktiem, virzās 2-3 mm uz ceļa.
Žiroskopiskais efekts
Līdzsvara teorijas pamatā ir labi zināma fizikāla parādība, ko izmanto kosmosā, aviācijā un jūras navigācijā. Rotējoša objekta īpašību saglabāt kustības virzienu sauc par žiroskopisko spēku. Šī darbība ir redzama, braucot ar velosipēdu, kad tas ir sasvērts. Kamēr riteņi griežas, transportlīdzeklis saglabā līdzsvaru un nekad neapgāžas. Piemēram, jūlijs vai bērnu helikopters “darbojas” tikai tad, kad tas griežas. Lai pārbaudītu hipotēzi, fiziķi izveidoja īpašu velosipēda konstrukciju. Priekšpusē tika uzstādīts papildu ritenis, kas nesaskarās ar zemi un griezās pretējā virzienā. Eksperimenta rezultāts zinātniekus pārsteidza. Velosipēds pārvietojās perfekti un bez žiroskopa nepadevās.
Tādējādi, apstiprinājuši galvenos faktorus, kas ietekmē divriteņa stabilitāti kustībā, zinātnieki joprojām apspriež jaunas versijas.
Interesanti fakti
V.A. Jakubovičs
- Matemātisko teoriju, kas izskaidro velosipēda stabilitāti kustībā, izvirzīja zinātņu doktors V. A. Jakubovičs. Zinātnieks paskaidroja, kāpēc līdz šim nav radīts autonoms robots, kas vadītu velosipēdu. Internetā izplatītā informācija par mehāniskiem velosipēdistiem izrādījās viltota. Rūpīgāk aplūkojot kibernētiķi, atklājās vairāki triki. Izgudrotāji piestiprināja atsvarus, lai palielinātu konstrukcijas stabilitāti, pazemināja smaguma centru un paātrināja braucamo velosipēdu līdz lieliem ātrumiem.
Zinātnieka oponenti pierāda pretējo. Robots mācās ļoti ātri. Tas ir saistīts ar tās uzdevumu relatīvo vienkāršību: jums ir tikai jāiemācās saglabāt līdzsvaru. Tam ir spēja, kas nav pieejama cilvēkiem: tas reaģē uzreiz un 5 reizes sekundē pagriež riteni.
- Velosipēds bez braucēja var automātiski vadīt sevi, lai neapgāztos,” apgalvo ASV zinātnieki. Pateicoties linearizētas stabilitātes aprēķiniem, pētnieki ir izstrādājuši velosipēdu ar papildu riteņiem, kas griežas pretējā virzienā, un negatīvu stūres pozīciju.
- Atzinums atšķiras no fiziķu hipotēzēm. Velosipēda enerģijas avoti ir braucēja galvā. Cilvēka smadzenes cītīgi strādā, lai pasargātu mūs no apgāšanās. Riteņbraucēja līdzsvaru uztur zemapziņa.
Secinājums
Pierādījumi apstiprina žiroskopa un riteņa riteņa riteņa riteņa stabilitātes saglabāšanas nozīmi braukšanas laikā. Taču nav skaidra izskaidrojuma, kāpēc velosipēds braukšanas laikā neapgāžas. Iespējams, pastāv papildu spēks, kura izpratne pagaidām ir ārpus pašreizējām zināšanām.






Tomēr, manuprāt, braucot velosipēds neapgāžas, jo braucējs saglabā līdzsvaru un koriģē to, pagriežot stūri kritiena virzienā. Giroskopiskā griezes momenta ietekme uz riteni braukšanas laikā ir maz ticama, riteņa ātrums un riteņa masa nav pietiekami liela, lai radītu reaktīvo griezes momentu.
Stūrēšanas eksperiments neapstiprināja, ka braucējs notur līdzsvaru. Spiediet velosipēdu spēcīgi bez braucēja, tas brauks un neapgāzīsies, pat ja stūre ir iestrēgusi.